Modbus Server
(Accessing robot data through the MODBUS server)
What is Modbus:
Modbus is a serial communications protocol. Simple and robust, it has since become a defacto standard communication protocol and is now a commonly available means of connecting industrial electronic devices. The main reasons for the use of Modbus in the industrial environment are:
- developed with industrial applications in mind,
- openly published and royalty-free,
- easy to deploy and maintain,
- moves raw bits or words without placing many restrictions on vendors.

(Example of MODBUS in a SCADA system)
Purpose:
Give read and write access to data in the robot controller for other devices
How it works:
The robot controller acts as a Modbus TCP server (port 502), clients can establish connections to it and send standard MODBUS requests to it.
Functionality:
- Several clients can connect to the server at the same time- The server can respond to the following function codes:
- 0x01: READ_COILS (read output bits)
- 0x02: READ_DISCRETE_INPUTS (read input bits)
- 0x03: READ_HOLDING_REGISTERS (read output registers)
- 0x04: READ_INPUT_REGISTERS (read input registers)
- 0x05: WRITE_SINGLE_COIL (write output bit)
- 0x06: WRITE_SINGLE_REGISTER(write output register)
- 0x0F: WRITE_MULTIPLE_COILS (write multiple output bits)
- 0x10: WRITE_MULTIPLE_REGISTERS (write multiple output registers)
- The server will send a response to all requests
- The server responds error messages with exception codes:
- The server responds error messages with exception codes:
- 0x01: ILLEGAL_FUNCTION_CODE
- 0x02: ILLEGAL_DATA_ACCESS (if the request address is illegal)
- 0x03: ILLEGAL_DATA_VALUE (if the request data is invalid)
Process:
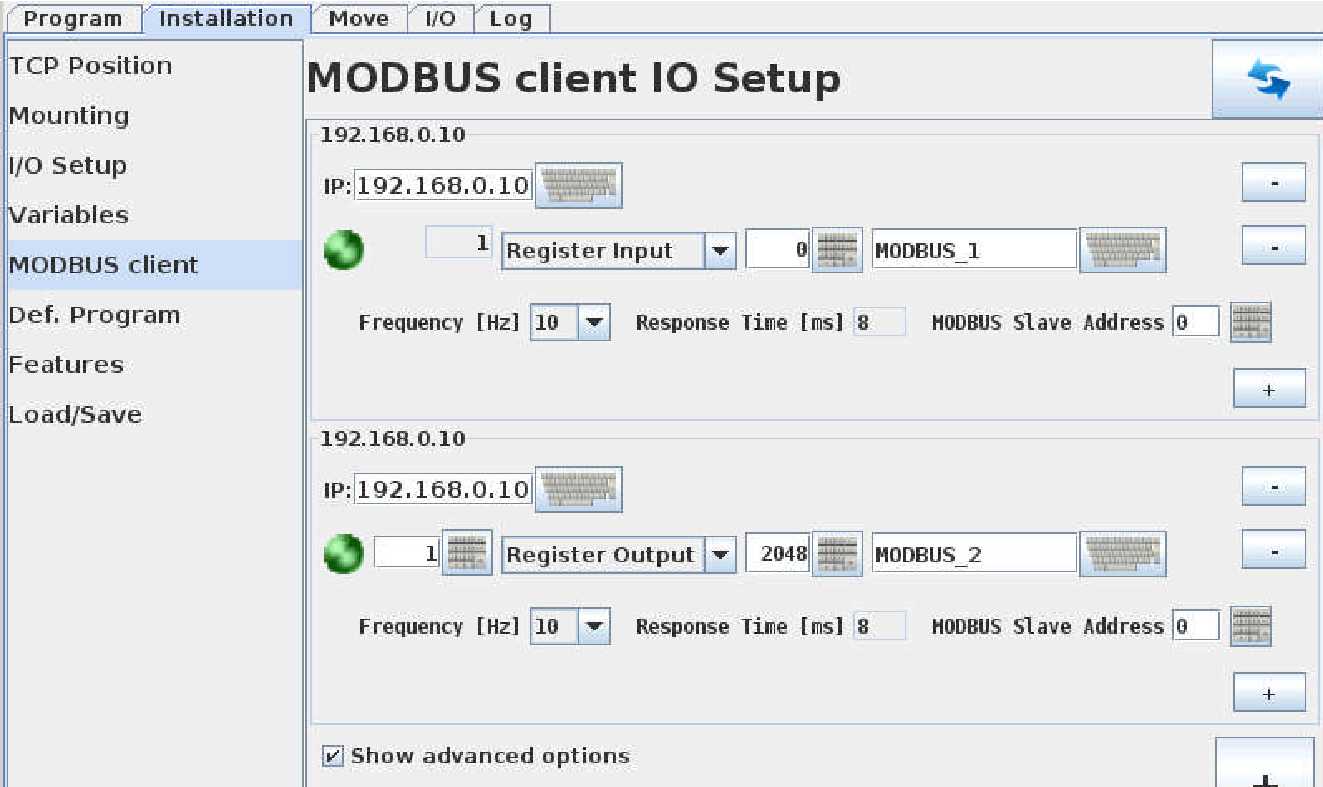
1. Setup MODBUS on UR https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/modbus-communication-16357/
2. Connect socket with port 502
3. Send request to the ur by port map 16-bit https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/modbus-server-16377/

4. Encode the data that received to position, rotation, etc. from hex data to decimal
5. Convert the data to real position with this code :
5. Convert the data to real position with this code :
if reg_xxx_i < 32768: reg_xxx_f = float(reg_xxx_i)/10if reg_xxx_i > 32767: reg_xxx_i = 65535 - reg_xxx_i reg_xxx_f = float(reg_xxx_i)/10*-1
Note : reg_xxx is variable that decode data is received from port map. If you need full code about Modbus please contract me
>> terus_limsurut@hotmail.com
ความคิดเห็น
แสดงความคิดเห็น